|
master board program
v. 2 - 2018
|
|
master board program
v. 2 - 2018
|
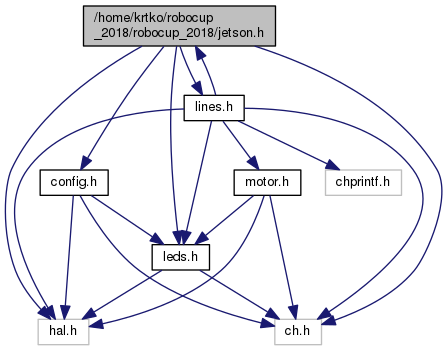
 Include dependency graph for jetson.h: This graph shows which files directly or indirectly include this file:
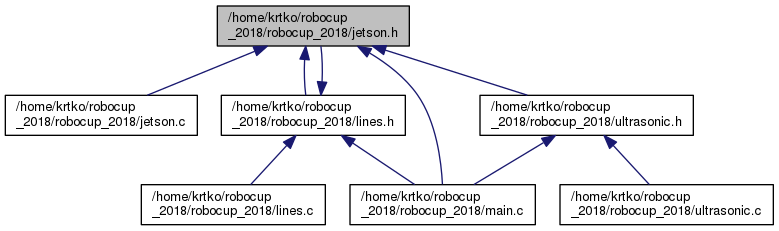
Include dependency graph for jetson.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | JETSON_SERIAL &SD6 |
| #define | LOAD_JETSON_VALUES 1 |
| #define | SAVE_JETSON_VALUES 2 |
| #define | JETSON_MOVE_COMMAND 255 |
| #define | KICK_COMMAND 254 |
| #define | START_COMMAND 251 |
| #define | LINE_CALIBRATION_COMMAND 250 |
| #define | INIT_COMMAND 249 |
| #define | RESET_COMMAND 248 |
| #define | DRIBLER_COMMAND 247 |
| #define | LINE_DETECTED_COMMAND 246 |
| #define | STOP_COMMAND 245 |
| #define | START_ULTRASONIC_COMMAND 244 |
| #define | STOP_ULTRASONIC_COMMAND 243 |
| #define | LEFT_TRUE 242 |
| #define | LEFT_FALSE 241 |
| #define | RIGHT_TRUE 240 |
| #define | RIGHT_FALSE 239 |
| #define | LEFT_CLOSE 238 |
| #define | RIGHT_CLOSE 237 |
| #define | START 3 |
| #define | STOP 5 |
| #define | START_STOP 6 |
| #define | DRIBLER_ON_OFF 4 |
| #define | KICK 2 |
Functions | |
| msg_t | send_jetson (msg_t command) |
| Send message to Jetson write thread. More... | |
| msg_t | get_jetson_values (void) |
| Send message to Jetson save thread which load movement values from jetson to main variables. More... | |
| void | jetson_init (void) |
Init of all 3 Jetson processing threads:More... | |
Variables | |
| uint16_t | ball_degree |
| int16_t | robot_speed |
| int16_t | robot_azimuth |
 1.8.11
1.8.11